A naukri.com initiative
Medium
1M
358
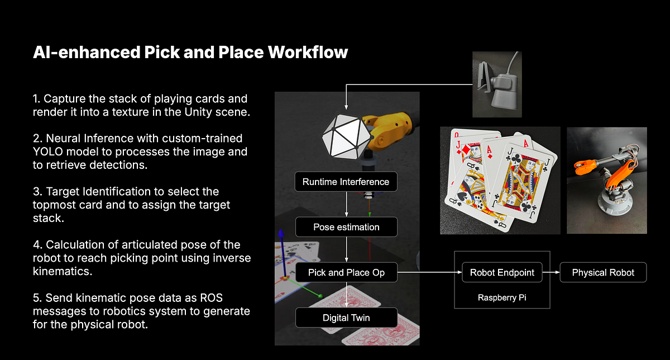
Image Credit: Medium
AI-powered Robotics: Pick and Place Demo with Runtime Interference and ROS in Unity
- A real-time AI-powered robotic system implemented in Unity3D simulates a card-sorting task, using computer vision to pick and place cards with an industrial robotic arm.
- The system uses a custom-trained YOLO-based object detector for card detection, with the Unity Runtime Inference Engine enabling real-time perception and control.
- The AI Builder Unity asset and Digital Twin Toolkit for Unity are utilized for training and integrating a Python-based AI vision training pipeline into Unity.
- The application connects to the real robot via ROS running on a Raspberry Pi, allowing the digital twin to control operations in a synthetic environment before replicating them on the physical robot.
Read Full Article
21 Likes
For uninterrupted reading, download the app