A naukri.com initiative
Hackaday
2d
332
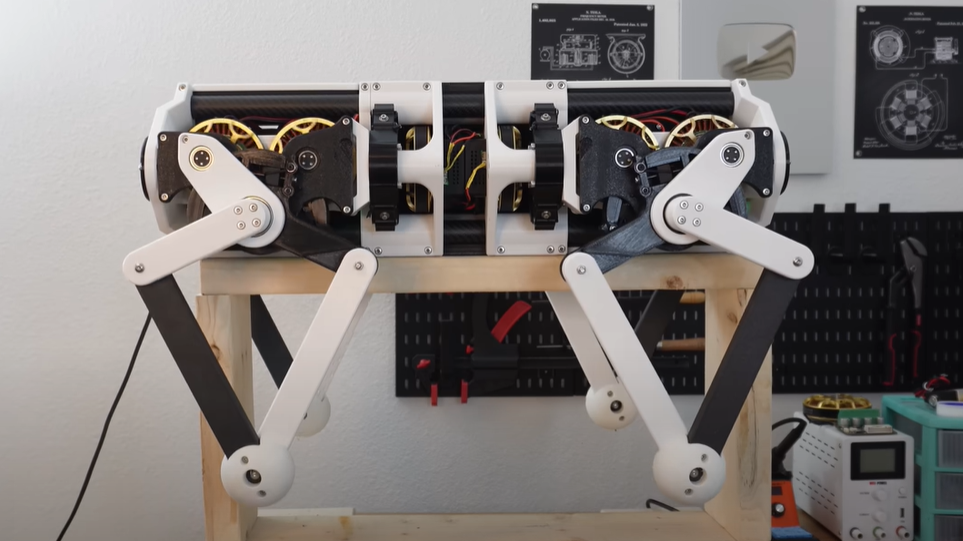
Image Credit: Hackaday
From Leash to Locomotion: CARA the Robotic Dog
- CARA is a robotic dog designed by [Aaed Musa] using 3D printed parts and brushless motors, with ropes used to tie the motors and legs together for locomotion.
- The design utilizes carbon fiber tubes for rigidity, 12 large brushless motors for torque, ODrive S1 motor controllers, a Teensy 4.1 microcontroller, a BNO086 IMU for sensing position, and a 24V cordless tool battery for power.
- Inverse kinematics math was used to achieve leg movement in all three axes, enabling CARA to move naturally and handle inclines.
- Tweaks were made to the design and additional tuning was done to enhance CARA's walking motion, showcasing [Aaed Musa]'s innovative approach to robotics.
Read Full Article
19 Likes
For uninterrupted reading, download the app