A naukri.com initiative
The Robot Report
1M
169
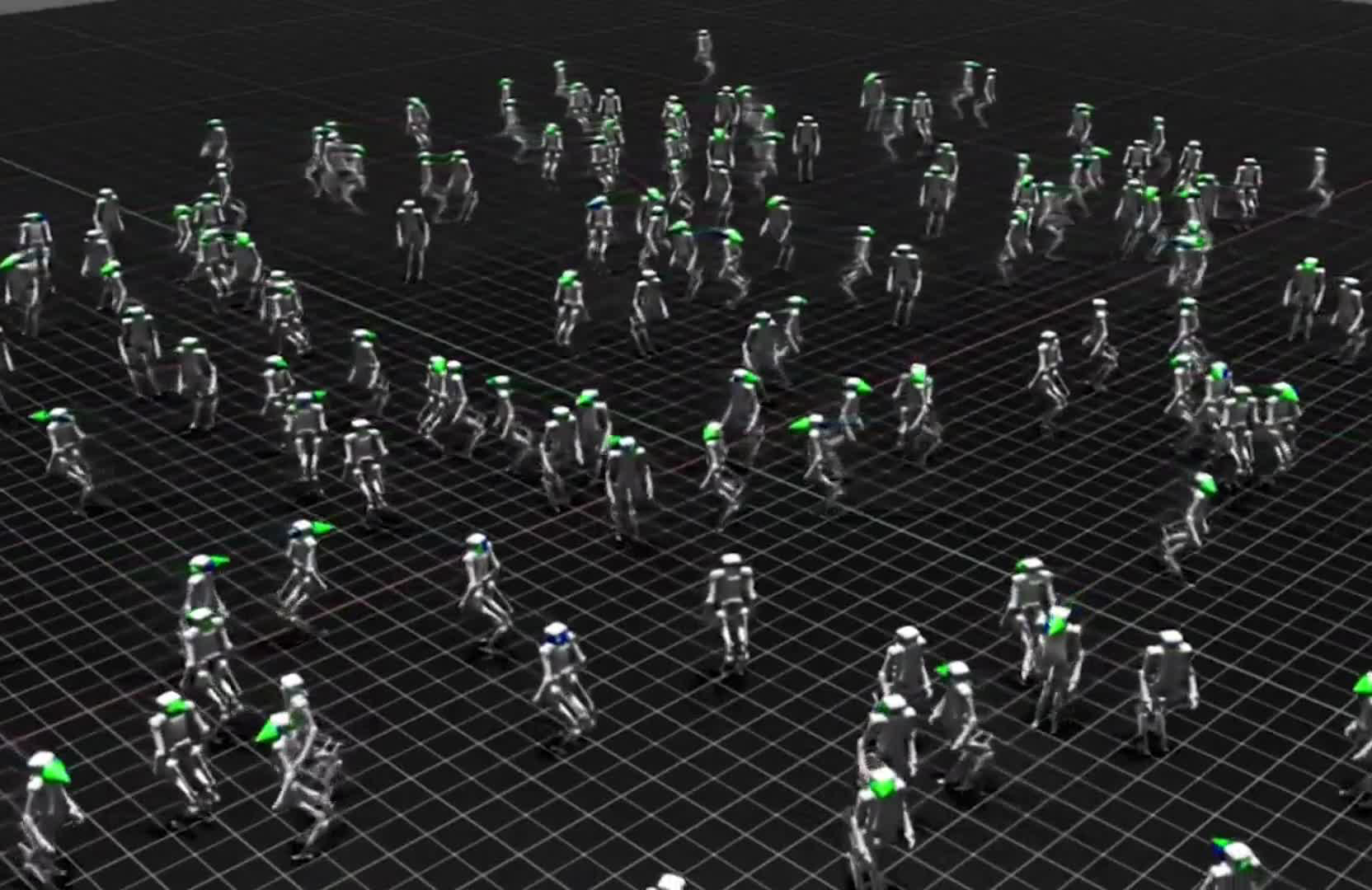
Image Credit: The Robot Report
How Agility Robotics crosses the Sim2Real gap with NVIDIA Isaac Lab
- Agility Robotics is using Reinforcement learning (RL) to model robots in a simulated virtual environment.
- Using a model-based controller and inverse dynamics approach to controlling a dynamic model requires us to know a lot about the world.
- RL is a better approach where instead of using real-time models, it simulates worlds to learn control policies for the robot to operate in various simulated environments.
- Learning controllers that work across different worlds that are similar enough to the real one.
- The challenge is to make policies trained in a simulator transfer over to a real robot; this is called the Sim2Real challenge.
- The company discovered toe impacts can lead to unbounded variations on their robots, and the Sim2Real gap comes into play.
- They've discovered simplifying assumption in collision geometry and concluded lessons learned in understanding why simulations differ to improve the accuracy of the algorithms.
- The company will discuss this at the Conference on Robot Learning to be held next week in Munich.
- Understanding the dynamics of the world and the robot helps to create simulations that are getting closer and closer to reality.
- RL is a way to explore the limits of what might be physically possible for robots.
Read Full Article
10 Likes
For uninterrupted reading, download the app