A naukri.com initiative
Medium
4w
143
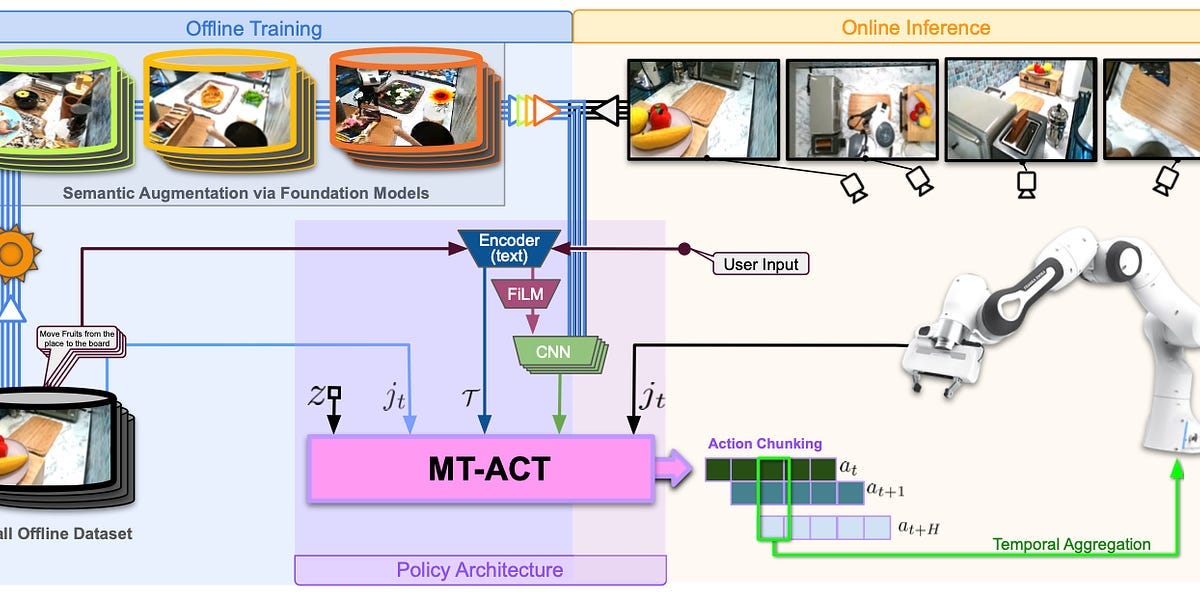
Image Credit: Medium
Paper Review | RoboAgent
- RoboAgent claims to have beaten Google Deepmind Robotics RT1 and performed on the same level as RT2.
- Project goal: Achieve generalization by training a single robot to manipulate arbitrary objects in various settings.
- Problem: Acquiring training data is expensive, and existing data is proprietary.
- Proposed solution: MT-ACT framework consisting of semantic augmentations, action representations, and action commands.
Read Full Article
8 Likes
For uninterrupted reading, download the app