A naukri.com initiative
Medium
2w
252
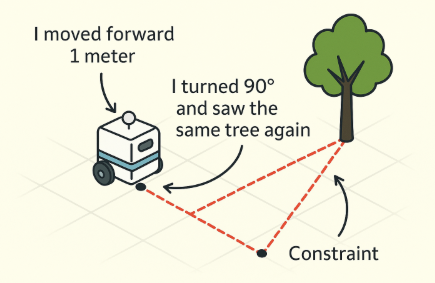
Image Credit: Medium
SLAM Explained - How Robots Build a Map While Finding Themselves
- SLAM stands for Simultaneous Localization and Mapping, which is crucial for robots to navigate effectively.
- Graph SLAM is a method used to solve the SLAM problem by creating a puzzle of constraints that helps the robot determine its position relative to its surroundings.
- In Graph SLAM, the robot utilizes movement and sensor data to build a matrix (Ω and ξ) that represents the relationships and clues collected during its exploration.
- By solving the equation Ω⋅μ = ξ, the robot can estimate its trajectory and the map of its environment by incorporating motion constraints and sensor observations.
Read Full Article
15 Likes
For uninterrupted reading, download the app