A naukri.com initiative
Mit
1M
274
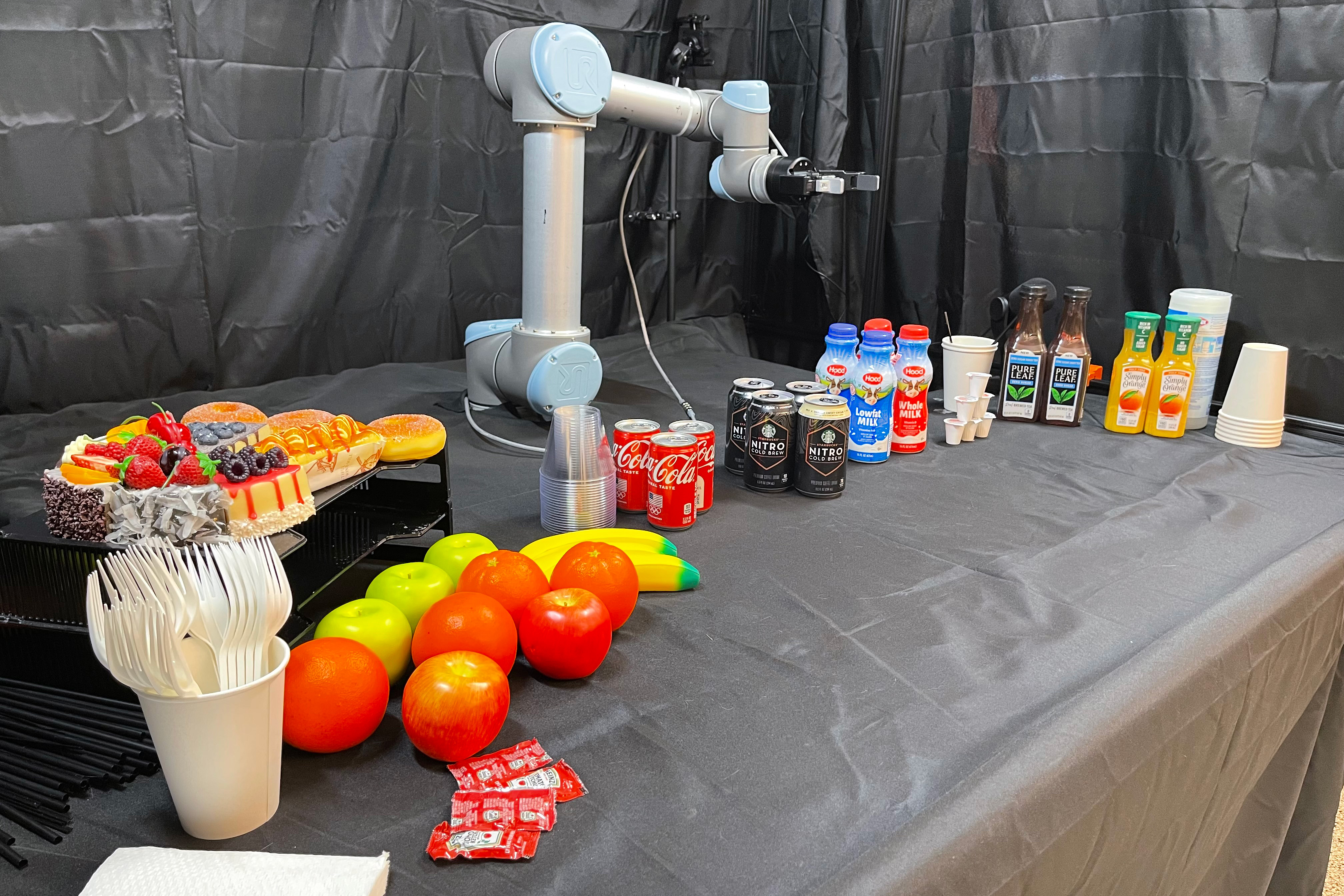
Image Credit: Mit
Robotic system zeroes in on objects most relevant for helping humans
- MIT roboticists have developed a system, called "Relevance," to help robots focus on relevant features in a scene for assisting humans.
- The Relevance approach enables robots to determine a human's objective using cues like audio and visual information.
- A robot can then identify objects most likely to be relevant in fulfilling the human's objective and act accordingly.
- In an experiment simulating a conference breakfast buffet, the robot successfully assisted humans in various scenarios with high accuracy.
- The robot predicted a human's objective with 90% accuracy and identified relevant objects with 96% accuracy.
- This method not only improves a robot's efficiency but also enhances safety by reducing collisions by over 60%.
- The system mimics the human brain's Reticular Activating System to selectively process and filter information.
- It consists of phases like perception, trigger check, relevance determination, and object offering based on relevance.
- The researchers aim to apply this system in smart manufacturing, warehouse environments, and household tasks for more natural human-robot interactions.
- The team's goal is to enable robots to offer seamless, intelligent, safe, and efficient assistance in dynamic environments.
Read Full Article
16 Likes
For uninterrupted reading, download the app