A naukri.com initiative
Hackaday
6d
318
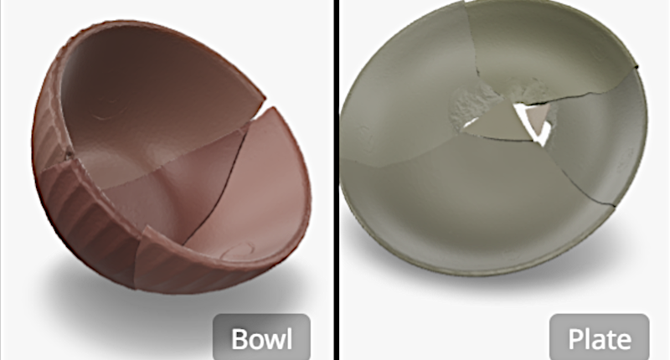
Image Credit: Hackaday
Software Project Pieces Broken Bits Back Together
- The GARF (Generalizeable 3D reAssembly for Real-world Fractures) project focuses on using machine learning to precisely reassemble broken objects.
- Traditional methods of reassembling objects from imperfect fragments are complex and time-consuming, while GARF utilizes synthetic data for training and successfully applies it to real-world objects.
- GARF is a software framework that can handle highly complex breakage patterns in 3D scanned fragments, even with imperfect edges or missing pieces.
- The GitHub repository for GARF includes the code and a demo is available for those interested.
Read Full Article
19 Likes
For uninterrupted reading, download the app